

 联系我们
联系我们

1. ABB机器人实际实际运行时,当前速度为运动指令内的speeddata(如上图的v1000)乘以当前程序速度百分比(如下图的100%)

2. 若运动指令中,使用\v:=100,则该语句使用100mm/s的速度代替原有v1000运行,如下图

3. 若运动指令中,使用\T:=1,则完成该运动语句为1s,代替原有v1000速度
4. ABB机器人还提供以下设置速度指令

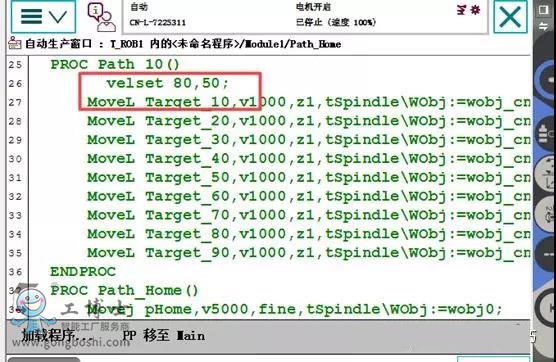
5. 可以使用速度设置指令Velset80,50指令来批量设置速度。其中80表示后续速度乘以80%,但运动语句的***速度不能超过50mm/s。下图机器人将以50mm/s速度运行
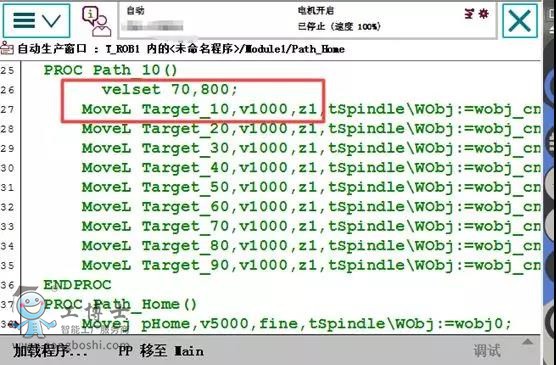
下图机器人将以700mm/s速度运行
6. SpeedRefresh 80 表示之后运动语句的机器人会以80%速度运行
7. 可以在程序一开始插入如下指令限制单轴速度
SpeedLimAxis ROB_1,1,20;
表示1轴***大速度为20°/s。
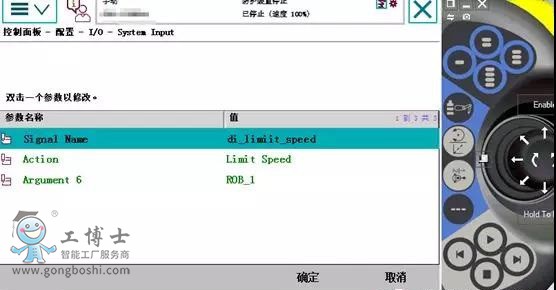
当关联了系统输入LimitSpeed时,对应信号为1,则机器人1轴速度被限制为20;信号为0,机器人速度恢复。
8. 进入控制面板-系统输入,关联Limit Speed功能,如下图。
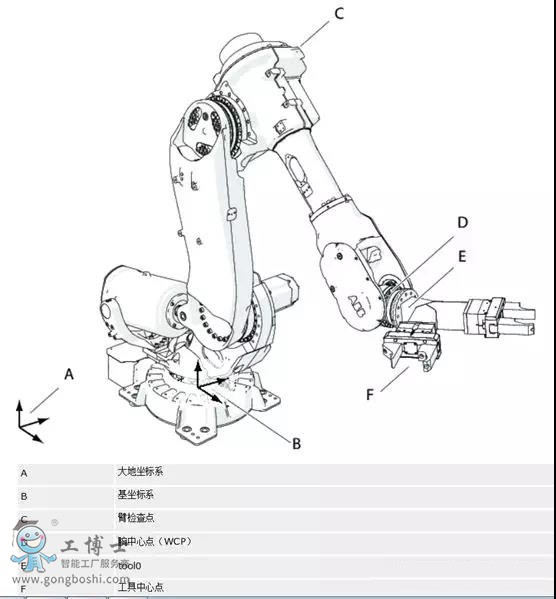
9 也可插入线性速度限制指令SpeedLimCheckPoint 200; 则在系统输入Limit speed为1时,机器人速度被限制为200,系统输入Limit Speed为0时,速度恢复。
该指令对下图的C-F共4个位置进行速度限制
了解更多ABB机器人

文章来源网络,如有侵权请联系删除
