

 联系我们
联系我们

1、松手即停
功能定义的描述,在手册里截图如下

配置的步骤,如下:
ABB配置 -- Controller -- Operator Safety
Hold-to-run,状态设定为 TRUE,激活有效。FALSE,未激活。
根据上面的配置,功能激活之后,机器人就有启用松手即停功能了。

2、路径折返
路径折返,其功能定义描述
当机器人路径偏离所编程的路径时,就必须实施路径折返移动。
举例来说,如果发生了一次不受控制的停止,或机器人已因为点位移动而偏离其路径,那么就会需要实施此类移动。
折返移动将在下令启动程序时开始,在重新按指令继续(之前因一次停止请求而中断)前停止。

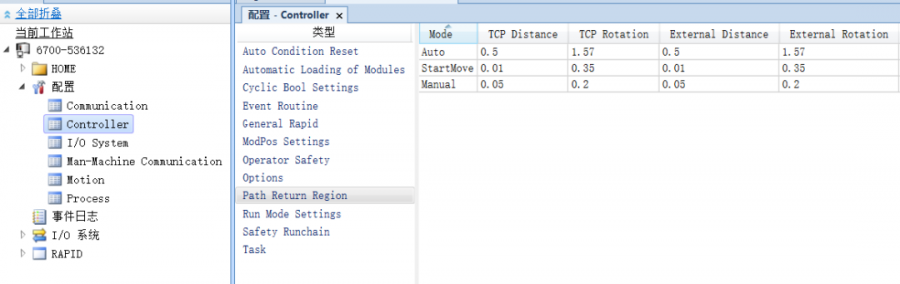
ABB主菜单 -- 配置 -- Controller -- Path Return Region
Auto,设定折返距离,回转角度。
StartMove,设定折返距离,回转角度。
Manual,设定折返距离,回转角度。
根据上面的配置,配置设定后,机器人就具有这个功能了,正常的配置会默认启用。
了解更多ABB机器人

文章来源网络,如有侵权请联系删除
