

 联系我们
联系我们

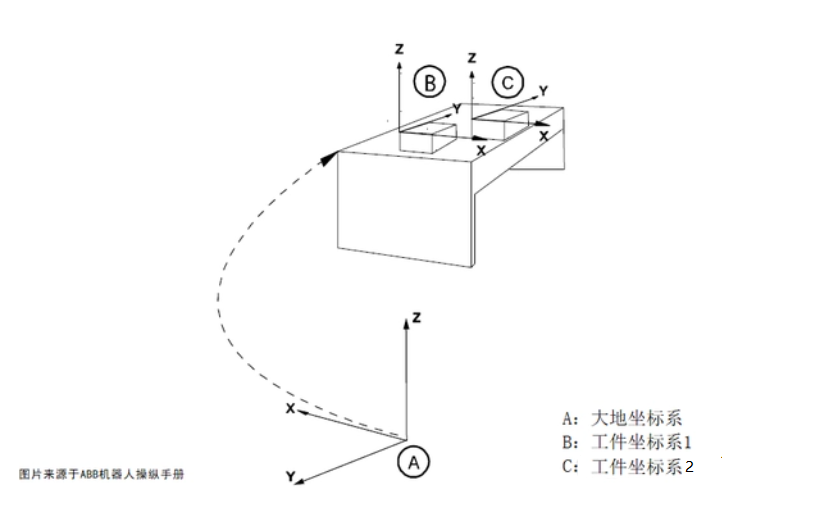
工件坐标系对应工件:它定义工件相对于大地坐标系(或其它坐标系)的位置。
工件坐标系必须定义于两个框架:用户框架(与大地基座相关)和工件框架(与用户框架相关)。
机器人可以拥有若干工件坐标系,或者表示不同工件,或者表示同一工件在不同位置的若干副本。
对ABB机器人进行编程时就是在工件坐标系中创建目标点和轨迹路径。这会给操作人员带来很多便利,如重新定位工作站中的工件时,只需更改工件坐标系的位置,所有路径将即刻随之更新;允许操作以外部轴或传送导轨移动的工件,因为整个工件可连同其路径一起移动。
机器人工作站创建
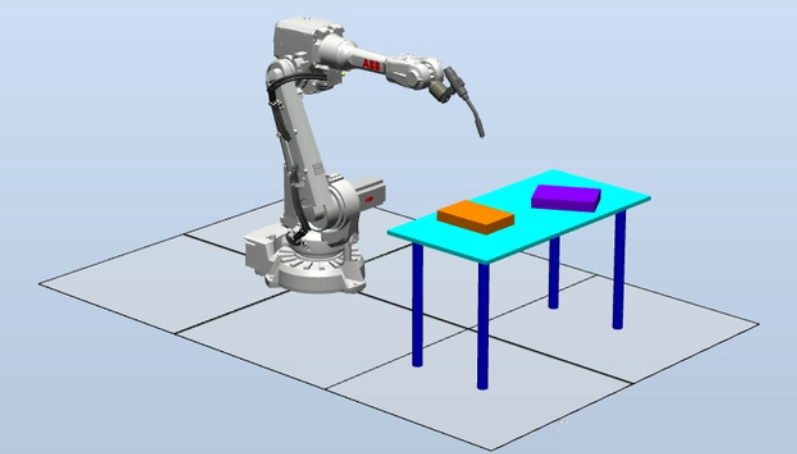
在RobotStudio软件中添加一台ABB机器人,再添加工具模型、工作台模型和两个相同的工件模型,并分别将其安装摆放到合适位置,工作站效果如下图所示,***后创建虚拟机器人系统。
ABB机器人的工件坐标系对应于系统中的工件数据,在使用之前需要先对其进行标定。
打开虚拟示教器,切换到“手动运行”模式,依次点击“ABB菜单”→“手动操纵”,在手动操纵界面中点击“工件坐标”,进入手动操纵-工件界面。
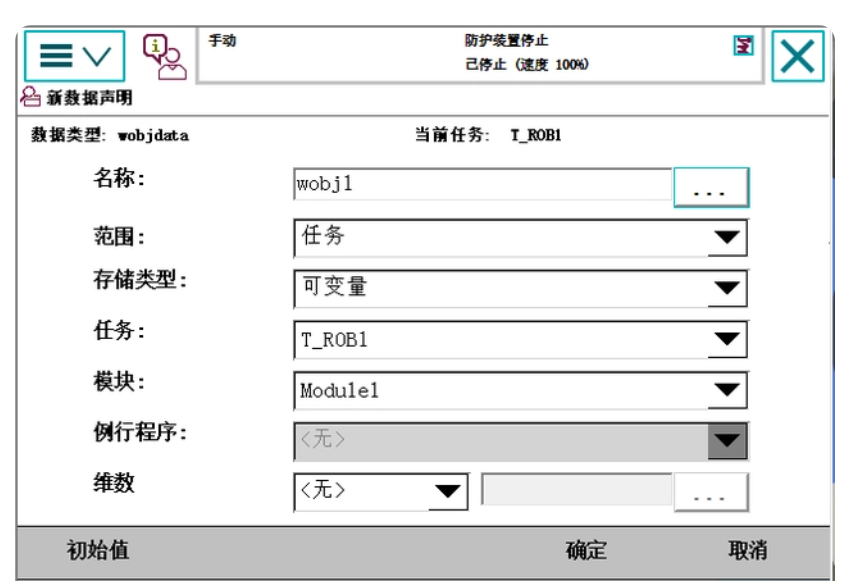
点击下方的“新建”,在新数据声明界面中设置工件数据的创建参数,这里保持默认,点击“确定”,名称为“wobj1”的工件数据创建完成。
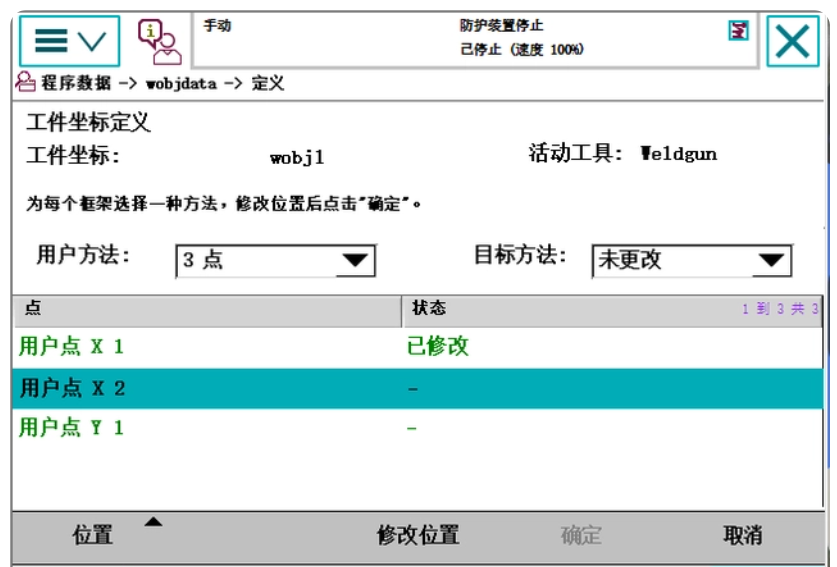
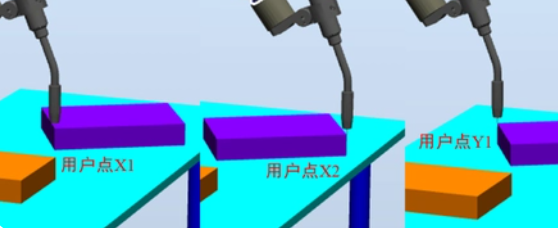
点选新创建的wobj1,然后依次点击“编辑”→“定义…”,进入工件坐标定义界面。在用户方法后点选“3点”,下方出现用户坐标系的三个标定点位。
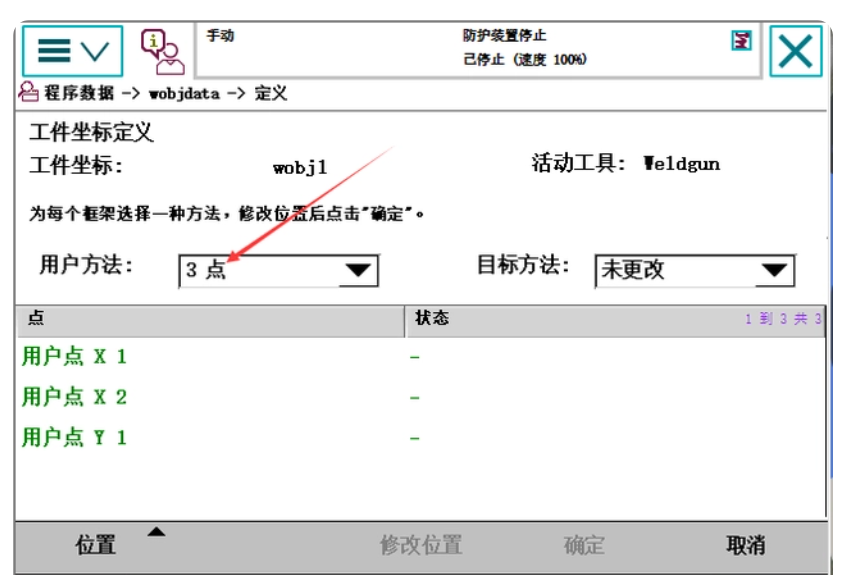
手动运行机器人TCP到工件的某个角点上,点选“用户点X1”,再点击“修改位置”,后方的状态栏显示“已修改”,***点标定完成。

工件坐标系在机器人手动运行时也能起到重要作用,尤其是工件的安装方向与机器人TCP或基座标系方向不一致时,就可以利用与工件方向标定一致的工件坐标系来手动运行机器人,这会为操作人员的示教编程提供更多便利。
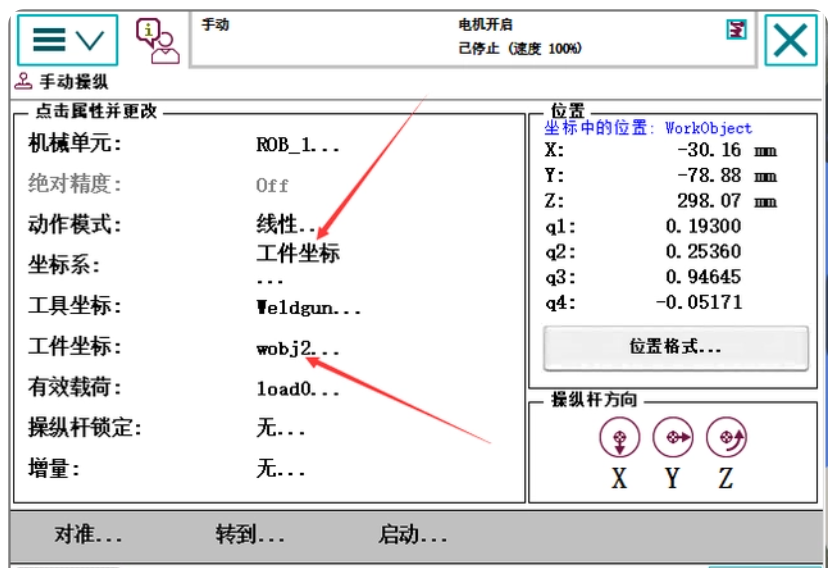
在虚拟示教器中依次点击“ABB菜单”→“手动操纵”,在手动操纵界面中点击“坐标系”,进入手动操纵-坐标系界面,选择“工件坐标”,点击“确定”。
再点击“工件坐标”,在手动操纵-工件界面中选择“wobj2”,点击“确定”。
工件坐标系应用
工件坐标系除了在机器人手动运行时能够提供便利外,在机器人示教编程时同样能够提供便利。对于安装在不同位置或不同的安装角度的若干个工件,如果具有相同的加工运行轨迹,那么通常情况下只需要编写一个工件的加工运行轨迹程序,其他工件的加工运行轨迹程序只需要复制粘贴***个工件的轨迹程序,然后将工件坐标系设定为相应工件的工件坐标系即可。
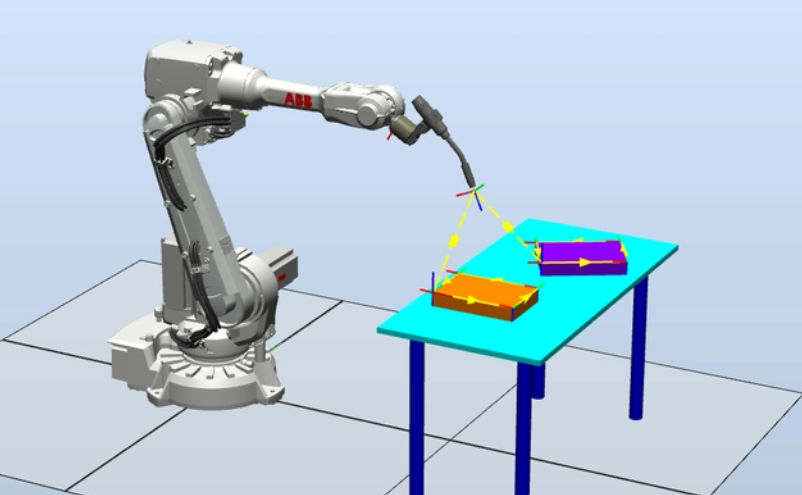
为机器人示教工件1的加工运行轨迹编程,工件坐标系使用wobj1;然后复制粘贴工件1的加工运行轨迹程序,将工件坐标系修改为wobj2。将程序同步到虚拟工作站,可以看到工件1的加工运行轨迹自动变换为工件2的加工运行轨迹,如下图所示。
了解更多ABB机器人
文章来源网络,如有侵权请联系删除
