

 联系我们
联系我们

当RobotWare基本系统中添加了 RobotWare-Dispense选项时,确实如此准备好与默认功能一起使用。然而,功能是可以的根据特定的涂胶设备定制选择,这和弧焊功能包类似
2)主要指令有DispL和DispC,其中DispL为走直线,DispC为走圆弧
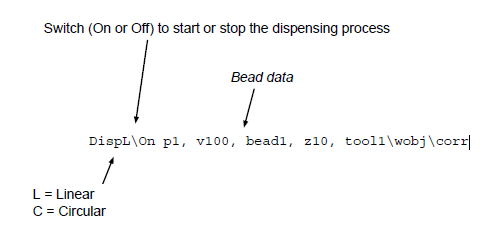
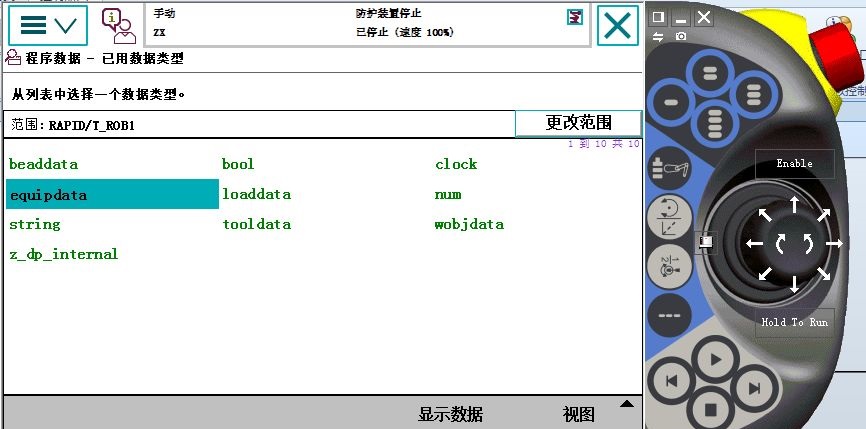
3)分配数据应该在编程之前定义。分配数据是分为两类Equipdata和Beaddata
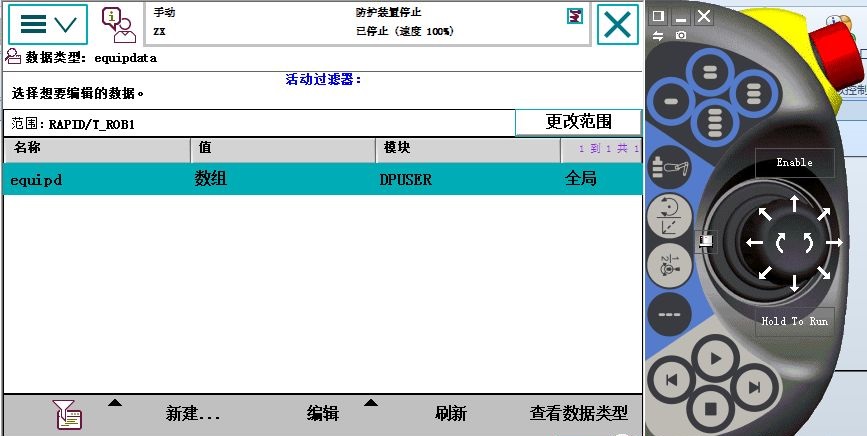
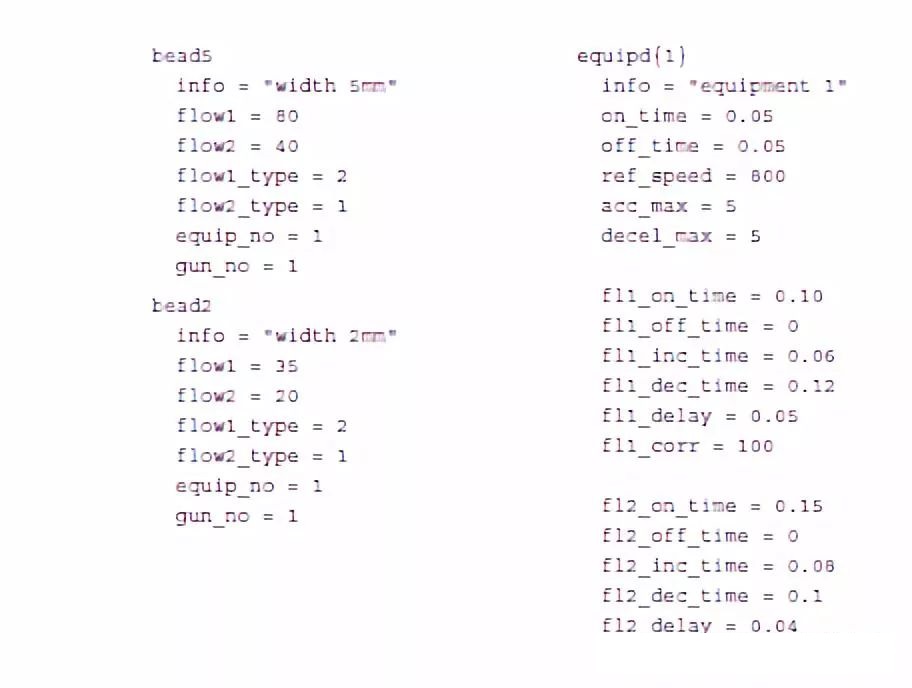
Equipdata(设备)数据用于保存设备的具体数据。这是分配数据不同的beads之间通常不会有差异。***多可以用4个不同的设备。设备1 - 4的设备数据位于一个系统模块DPUSER中的数组(设备)。当前设备数据中的数据在执行分配指令时执行。
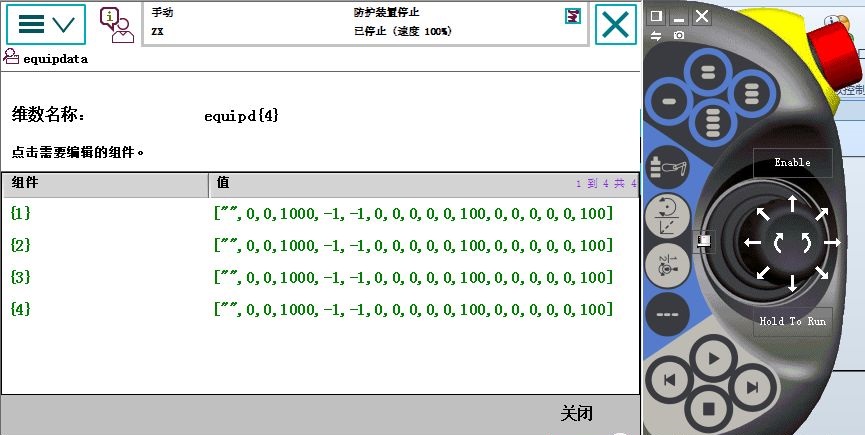

Equipdata数据包含以下数据
info:字符串信息(80char)
on_time:开枪时间
off_time:关抢时间
ref_speed:机器人运动参考速度
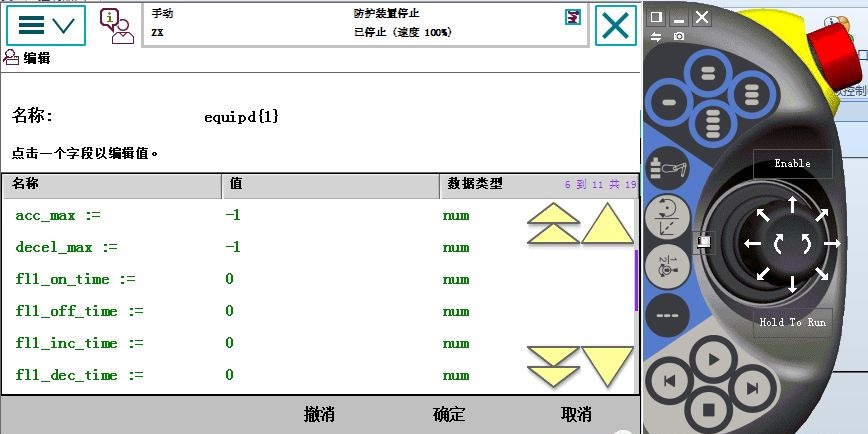
acc_max/decel_max:机器人运动的加速/减速限制
fl1_on_time/fl1_off_time:预测开qiang/关qiang数字信号的时间
fl1_inc_time:预测模拟流量信号的时间
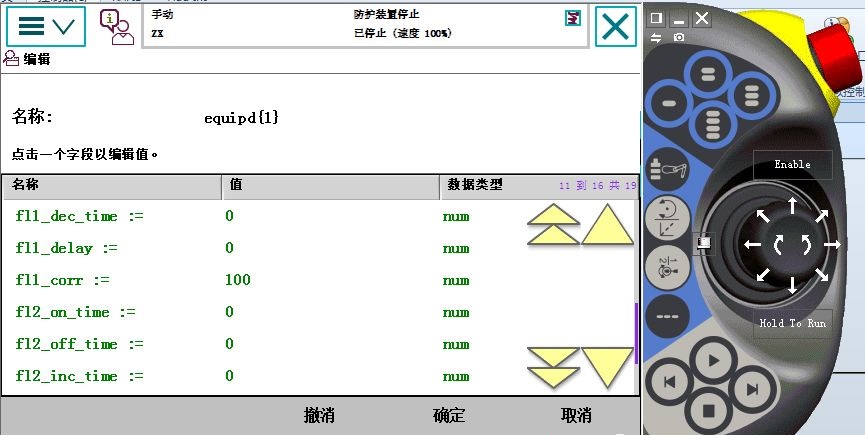
fl1_dec_time:设备延迟补偿次数
fl1_corr:流量校正系数

改变设备数组中的数据使其与所使用的设备相对应。涂胶宽度在恒定的情况下涂胶在在***的位置程序中执行开始/换qiang/结束等相对应的涂胶数据。
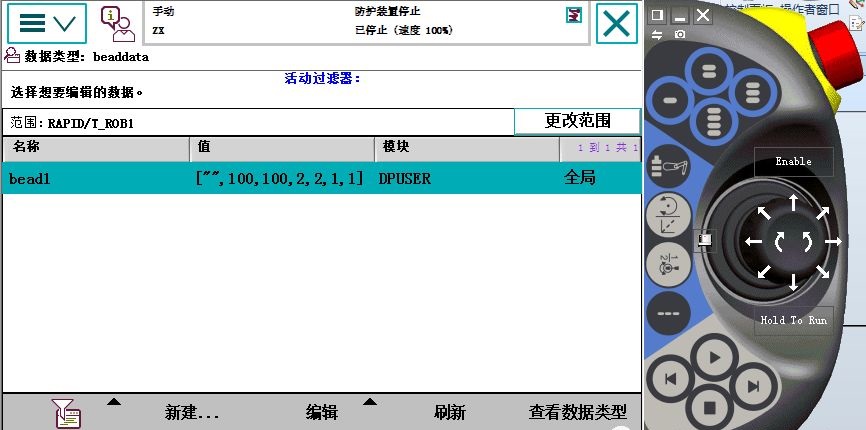
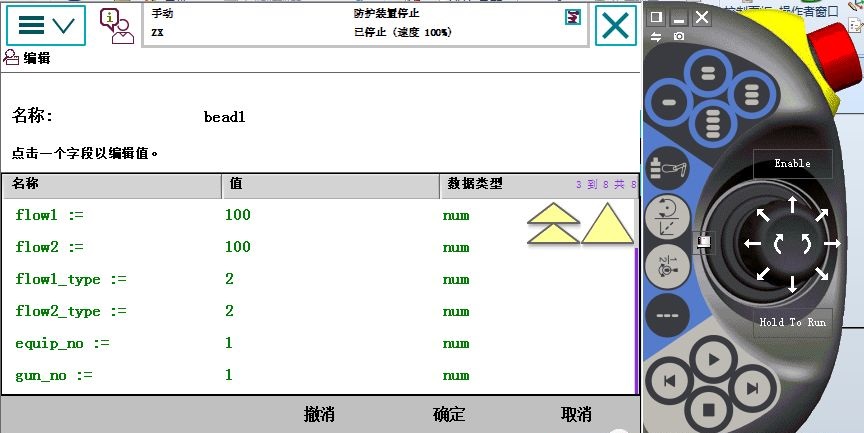
Beaddata用于保存胶qiang特定的数据。这是分配数据决定了涂胶的外观,而不同的胶qiang之间通常是不同的。在分发系统模块DPUSER中,一个beaddata (bead1)被预定义为默认值。
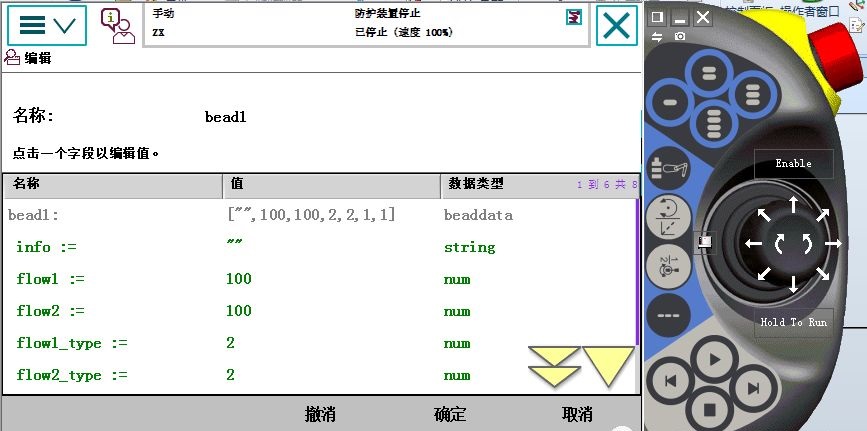
Beaddata数据包含以下数据
flow1/flow2:flow1和flow2的流速
flow1_type/flow2_type:flow1和flow2的流量类型
equip_no:设备号
gun_no:qiang号
Eg:
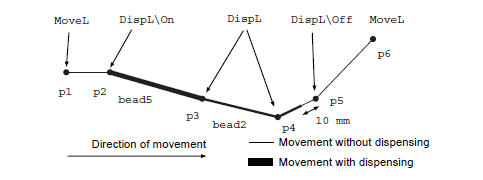
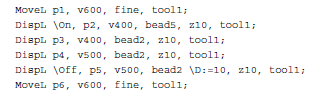
通过实例举证,机器人通过P1点,在P2点开1号qiang采用bead5涂胶宽度5mm,在P3点切换流量涂胶宽度2mm到P4位置,在P5位置前10mm关qiang结束涂胶,胶qiang运动到P6安全位置。
了解更多ABB机器人
文章来源网络,如有侵权请联系删除
