

 联系我们
联系我们

1.ABB机器人支持多任务(每台机器人本体*多一个运动任务)。
2.使用多任务,机器人要有623-1 mulTItasking选项
如何新建多任务?
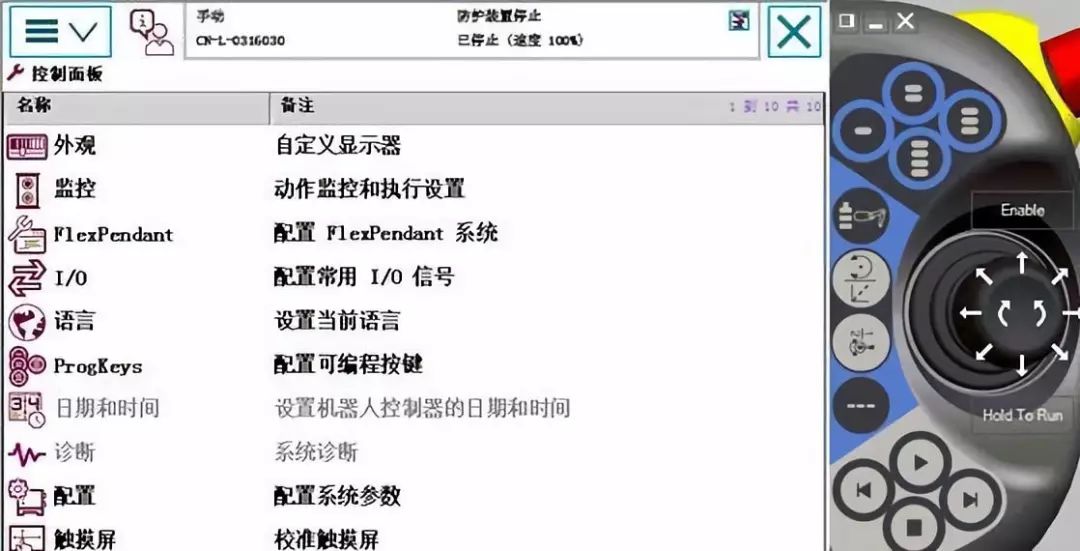
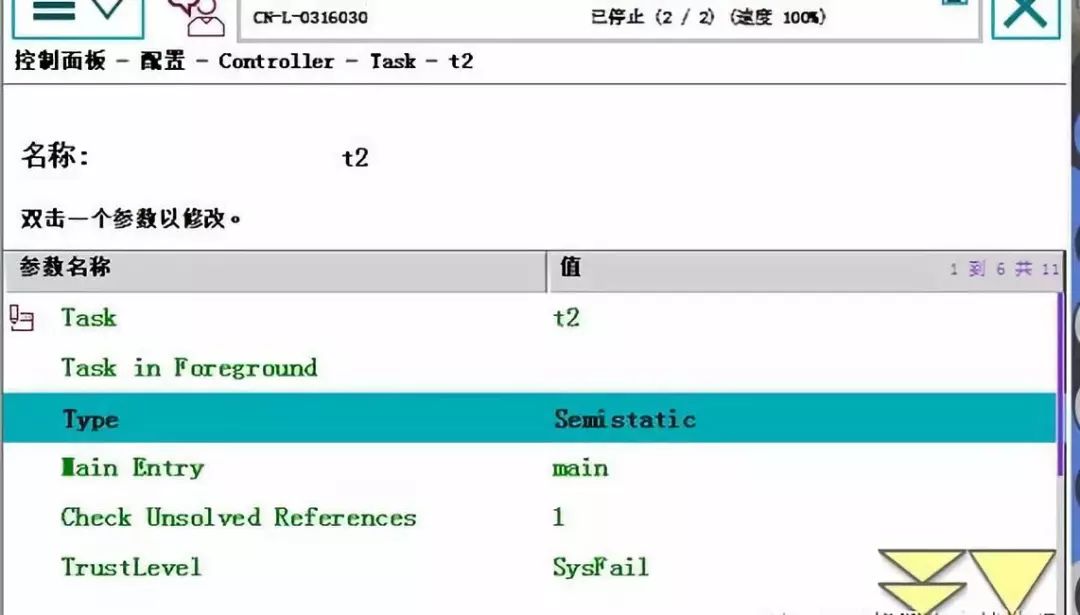
4.控制面板,配置
5.主题controller
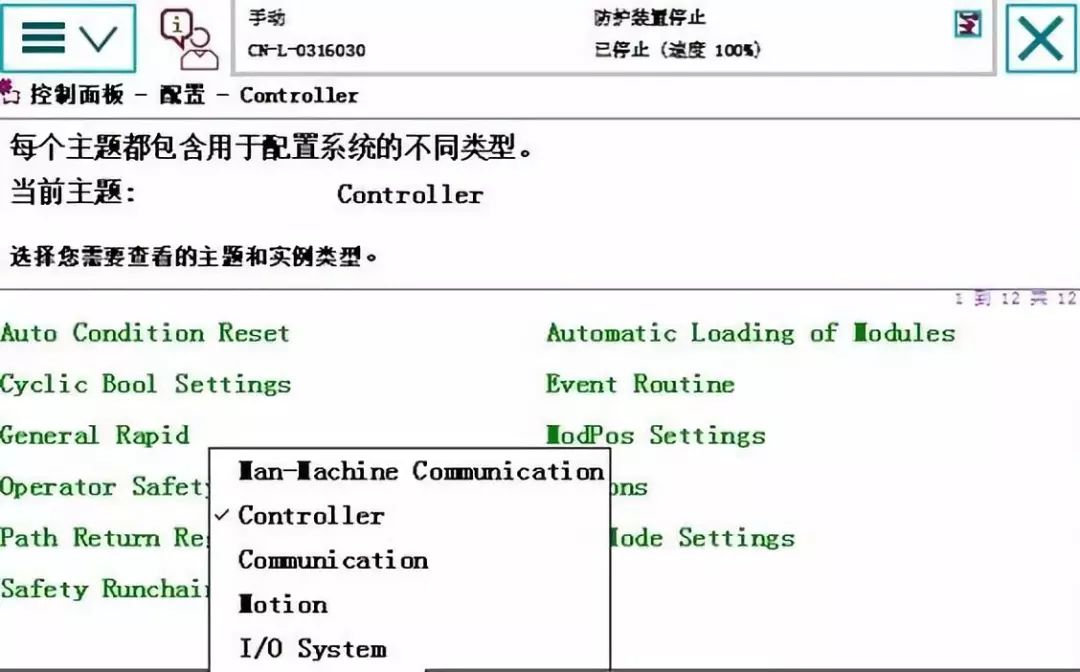
6.进入task,新建一个
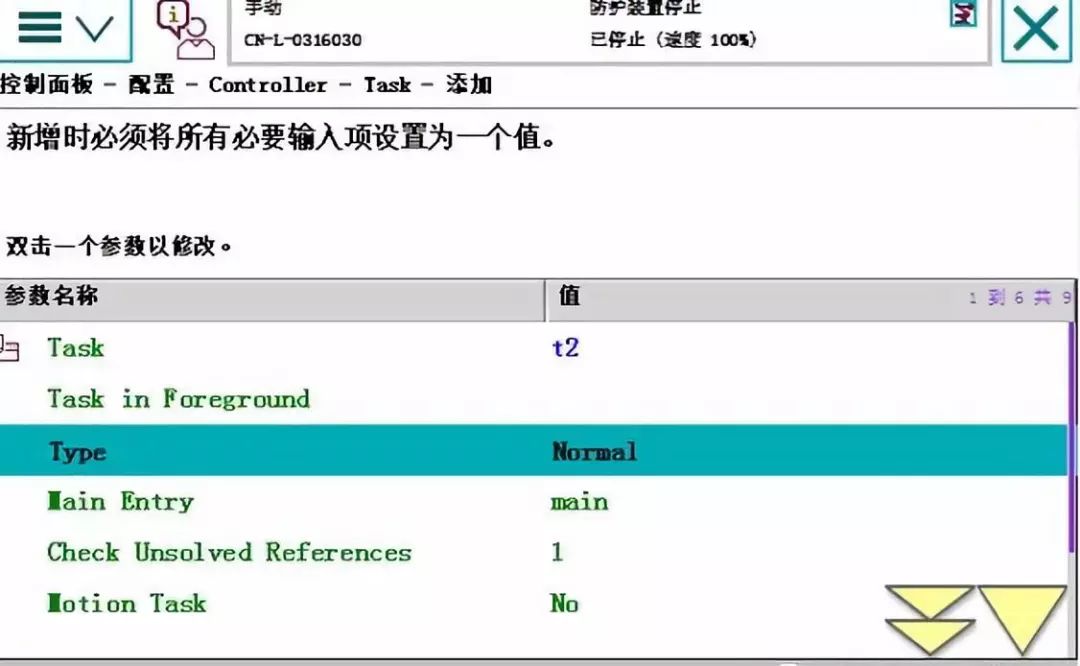
这个时候要设为normal,否则不能编程,全部编程调试好,再设回semi staTIc就可以开机自动运行了。
7.重启
8.程序编辑器 进入t2 task。
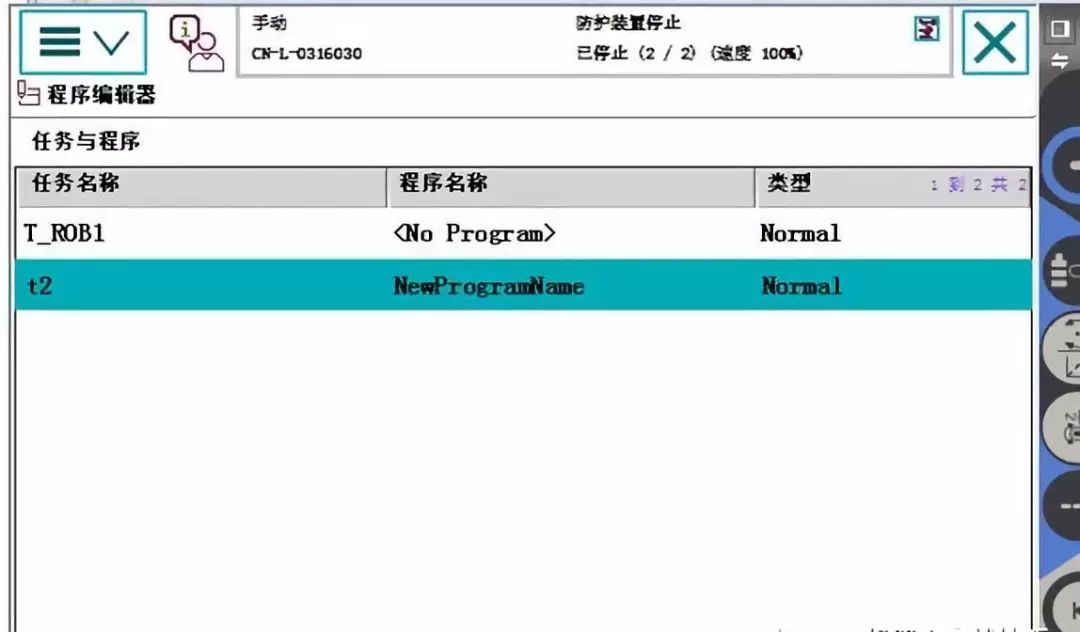
9.如何多任务间传输数据?以下以任务间传输bool量flag1为例(即任何一个任务修改了flag1值,另一个任务flag1值也修改)
10. 前台和后台都要建数据,存储类型必须是可变量,类型一样,名字一样,比如:
Pers bool flag1
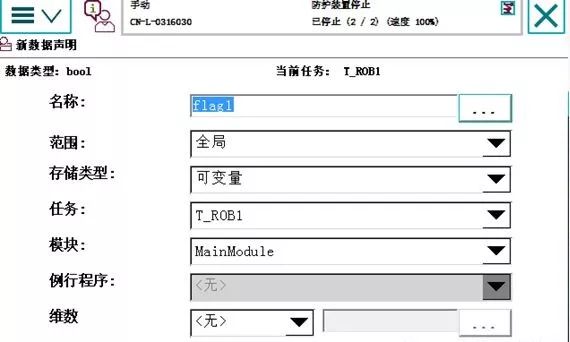
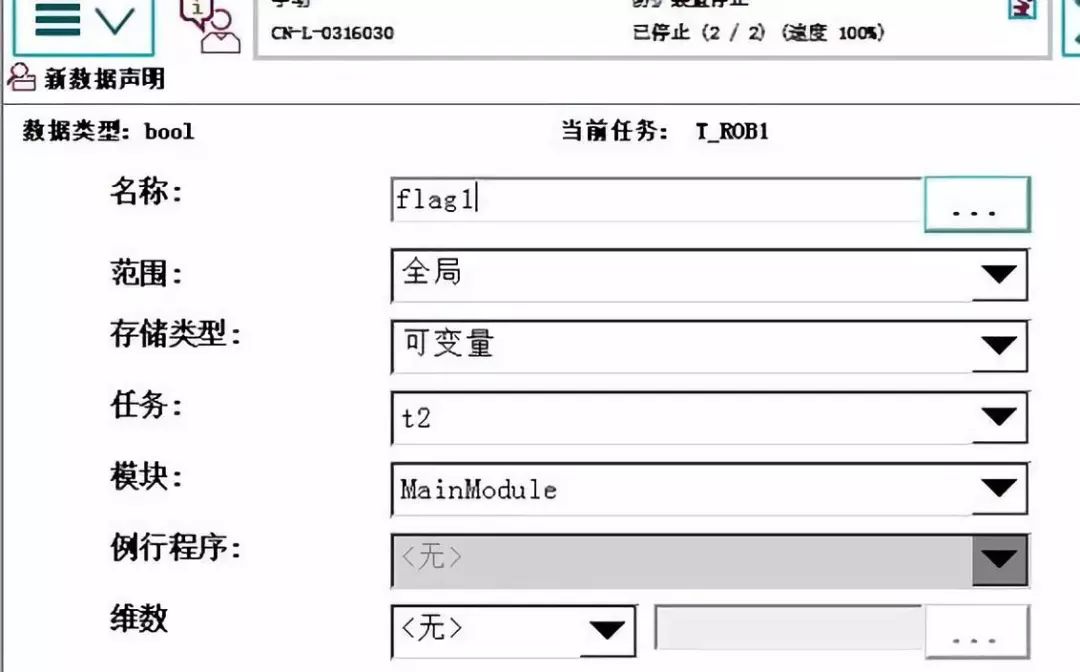
也就是2个任务里 必须都有这个flag1,而且必须是可变量。
11.在t2里,代码如下
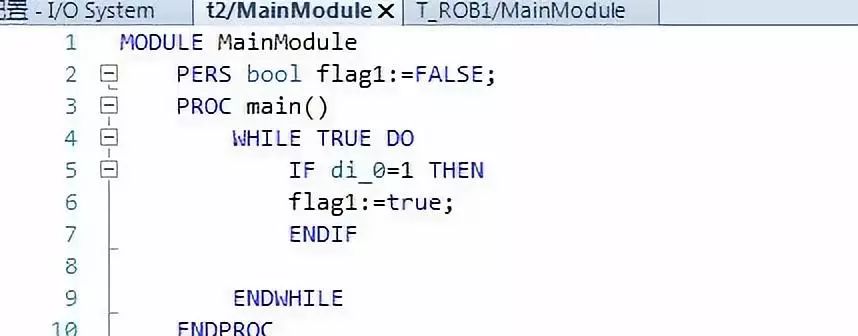
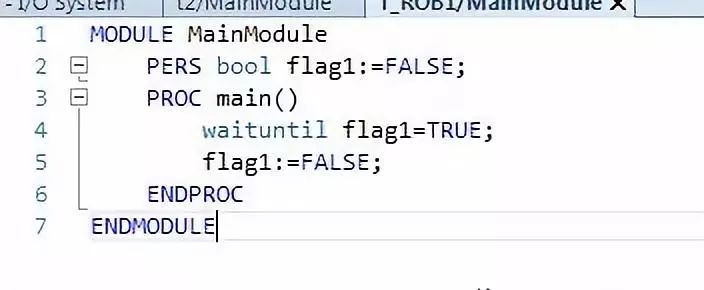
以上就能实现后台任务实时扫描di_0信号,如果di_0信号变1,flag1即为true。前台根据逻辑,一直等待flag1为true。执行过waitunTIl后,把flag1置false
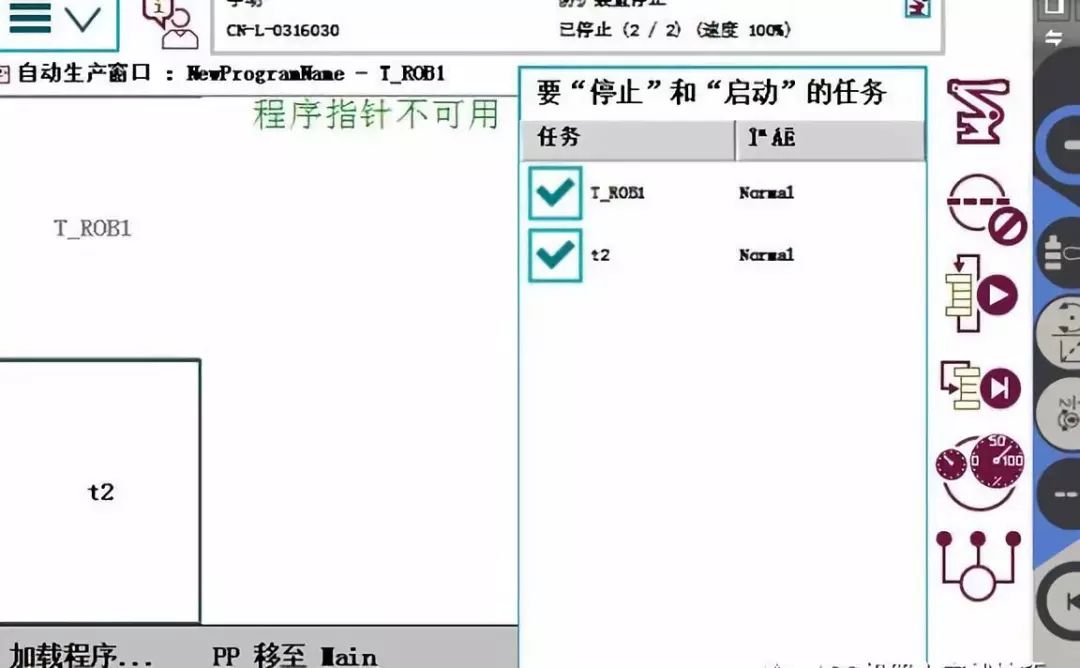
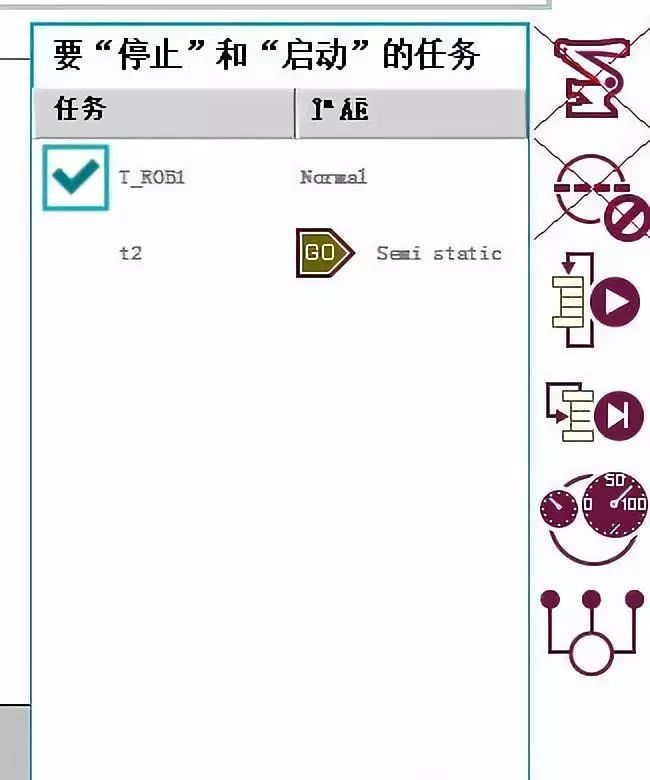
13.如何运行?
示教器右下角*下面一个点开,确保2个任务都勾上,然后运行,可以测试一下
更多ABB机器人
