

 联系我们
联系我们

1)2台ABB机器人,如果有多个信号要通讯,除了IO接线外,有没有更方便和经济的方法?
2)可以使用总线,诸如PROFIENET,ETHERNETIP等,但都需要购买选项
3)大多数机器人都配置了709-1DEVICENETMASTER/SLAVE选项
4)完成两台机器人接线和相应配置后,就可以通过devicenet通讯,经济,快速。
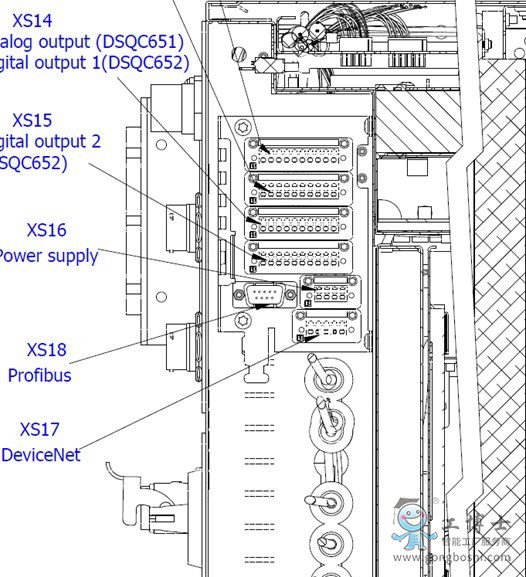
5)如果2台机器人都是compact紧凑柜,则只需把两台机器人的xs17 DEVICENET上的2,4针脚互联,(1和5为柜子供电,不需要互联)原有终端电阻保持(不要拿掉)。
6)Devicenet回路上至少有一个终端电阻,或者链路两端各有一个终端电阻。紧凑柜本身只有一个终端电阻,故2台机器人连接后链路只有2个终端电阻,不需要拆除
7)如果是2台标准柜,因为柜内本身就有2处终端电阻,在相应devicenet接线处把2台柜子的devicenet针脚2和4互联(1和5为供电,不需要互联),然后柜内各拆除一个终端电阻(保证整个链路上只有2个终端电阻)
8)打开作为slave的机器人,控制面板-配置-主题IO,IndustryNetwork-Devicenet,设slave的地址(默认为2,如果master为2,slave不能为2,可以比如改为3)

9)控制面板-配置-主题IO,DevicenetInternal Device,设置输入输出字节数

10) 建立信号,所属device为DN Internal Device

11) 打开作为master的机器人,控制面板-配置-主题IO,DeviceNet Device

12) 添加,选择模板

修改对应slave的地址

注意,connection type要修改为Polled(默认COS,但2台机器人之间通讯不支持)

13) 建立信号,所属设备选择刚刚建立的slave设备DN_Device

14) 重启后即可测试
了解更多ABB机器人

文章来源网络,如有侵权请联系删除
