

 联系我们
联系我们

ABB机器人轨迹编程中***常见的编程,有直线运动指令MoveL、关节运动指令MoveJ、圆弧运动指令MoveC,***位置运动指令AbsMoveJ。
语法格式为:
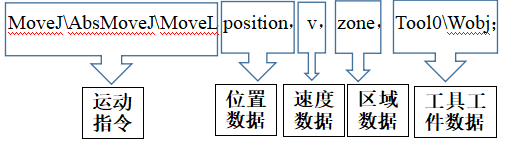
指令
MoveJ:关节运动指令,机器人的工具中心点TCP从一个位罩移动到另一个位置,两个位置之间的路径不一定是直线。该指令在机器人运动过程中轨迹没有严格要求,只需机器人能快速平滑的运动到下个目标点。通常在轨迹之间的过渡位置或者在任务开始或结束阶段回归机器人Home点时会经常使用到这个指令。
MoveL:直线运动指令,机器人以线性移动方式运动至目标点,当前点与目标点两点确定一条直线,机器人运动状态可控,运动路径保持***,可能出现死点,机器人作业时使用该指令。
AbsMoveJ:关节轴运动指令,机器人以单轴运行的方式运动至目标点,***不存在死点,运动状态完全不可控,避免在正常生产中使用此指令,常用于检查机器人零点位置,指令中TCP与Wobi只与运行速度有关,与运动位置无关。常用于机器人六个轴回到机械零点的位置。机器人在运动中出现奇异点位置的时候,可以酌情使用AbsMoveJ指令。
MoveC:圆弧运动指令,机器人通过中间点以圆弧移动方式运动至目标点,当前点、中间点与目标点三点决定一段圆弧,机器人运动状态可控,运动路径保持***,机器人作业时使用该指令。
参数
位置数据:用于定义移动机械臂和附加轴的移动指令中的位置,包含:位置(Pos)、四元数(Orient)、轴配置(Confdata)、附加轴位置(Extjoint)。
示教目标点,位置移动机器至目标点即可,四元数的数据取决与机器人的姿态,重定位运动让机器人姿态位***佳,轴配置系统自动计算。
速度数据:用于规定机械臂和外轴均开始移动时的速率,可以在Speeddata中定义,也可以选用系统自带的速度数据,不可以随便输入速度数据,如V900。
轨迹编程的***高标准,运动速度可控、机器人运转得更快、定位更***、更稳定可靠,那么,当它启动和停止时就必须是平缓的,而不是猛然加速和骤然减速,在此速度数据的选择上我们应该有比较好的答案。
区域数据:用于规定如何结束一个位置,即在朝下一个位置移动之前,轴必须如何接近编程位置,可以在Zonedata中定义,也可以选用系统自带的区域数据,也不可以随便输入。
关节运动指令区域数据选择Z0以上,作用是有效提高运行效率;设置原则越大越好、不超过下段路径长度的一半。
直线运动指令区域数据选择Z0或者Fine,Fine是阻止预读,如果直线运动指令中全选用Fine,机器人运行轨迹不但不平滑,还影响生产节拍。Fine是阻止预读,常用于信号指令前面,在某些生产中机器人回Home点时,也需要用Fine。
轨迹编程的主要目的就是使机器人,运动轨迹平滑、准确、稳定,达到***优轨迹,提高机器人的工作效率。
工具数据:用于描述工具(例如,焊枪或夹具)的特征。此类特征包括工具中心点(TCP)的位置和方位以及工具负载的物理特征。
建立工具坐标系的主要目的把控制点转移到工具的***点上,工具坐标系的方向随腕部的移动而发生变化。
工件数据:用于描述机械臂作业于其内部移动等的工件
工件数据通常表示实际工件数据。它由两个坐标组成:用户坐标和工件坐标,其中,后者是前者的子框架。所有的编程位置将与工件坐标关联,工件坐标与用户坐标关联,而用户坐标与大地坐标系关联。
了解更多ABB机器人
文章来源弯路,如有侵权请联系删除
- 下一篇:ABB机器人之计时指令应用与详解
- 上一篇:机器人捆扎钢筋应用——ABB机器人
